python/ROS
ROS 기본실습
- -
roscore를 실행해 봅시다
터미널을 실행하고, roscore를 실행해 봅시다.
이전 개념설명에서 노드를 실행하기 위해선 반드시 master가 필요하다고 하였습니다. roscore는 master, rosout, parameter server를 동시에 실행해 줍니다.
$ roscore
... logging to /home/byeongkyu/.ros/log/21fb620a-a800-11ea-9d0f-00e18c79612a/roslaunch-byeongkyu-XPS-15-9570-12628.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://byeongkyu-XPS-15-9570:39705/
ros_comm version 1.14.5
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.5
NODES
auto-starting new master
process[master]: started with pid [12648]
ROS_MASTER_URI=http://byeongkyu-XPS-15-9570:11311/
setting /run_id to 21fb620a-a800-11ea-9d0f-00e18c79612a
process[rosout-1]: started with pid [12659]
started core service [/rosout]
원래는 각 언어별 tutorial용 패키지를 설치해야 하지만, ros-melodic-desktop-full을 설치하면 이미 설치되어 있을겁니다.
Node를 실행해 봅시다.
roscore를 실행한 상태에서, 터미널을 하나 더 실행하고 다음과 같이 입력합니다.
$ rosrun roscpp_tutorials talker
[ INFO] [1591453178.734187896]: hello world 0
[ INFO] [1591453178.834246343]: hello world 1
[ INFO] [1591453178.934399239]: hello world 2
[ INFO] [1591453179.034471362]: hello world 3
[ INFO] [1591453179.134447388]: hello world 4
[ INFO] [1591453179.234447849]: hello world 5현재 talker라는 실행 파일이 실행되었습니다. 이제 노드 하나가 실행되고 있는 상태입니다.
노드를 실행하기 위해선 rosrun이라는 명령을 사용했습니다.
$ rosrun -h
Usage: rosrun [--prefix cmd] [--debug] PACKAGE EXECUTABLE [ARGS]
rosrun will locate PACKAGE and try to find
an executable named EXECUTABLE in the PACKAGE tree.
If it finds it, it will run it with ARGS.실행되고 있는 노드를 종료하려면? ⇒ 해당 터미널에서 ctrl+c를 눌러줍니다.
Command tools related with nodes
노드와 관련한 여러가지 도구들이 존재합니다. 노드가 실행된 상태에서, 터미널을 하나 더 열고 다음의 명령어들을 실행해봅시다.
$ rosnode list
/rosout
/talker$ rosnode info talker
--------------------------------------------------------------------------------
Node [/talker]
Publications:
* /chatter [std_msgs/String]
* /rosout [rosgraph_msgs/Log]
Subscriptions: None
Services:
* /talker/get_loggers
* /talker/set_logger_level
contacting node http://byeongkyu-XPS-15-9570:34539/ ...
Pid: 13188
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (45503 - 127.0.0.1:44826) [11]
* transport: TCPROS
node와 관련해선 rosnode라는 도구를 사용합니다. 여러가지 기능을 수행할 수 있습니다.
$ rosnode -h
rosnode is a command-line tool for printing information about ROS Nodes.
Commands:
rosnode ping test connectivity to node
rosnode list list active nodes
rosnode info print information about node
rosnode machine list nodes running on a particular machine or list machines
rosnode kill kill a running node
rosnode cleanup purge registration information of unreachable nodes
Type rosnode <command> -h for more detailed usage, e.g. 'rosnode ping -h'
Understanding ROS Nodes
- 노드의 이름은 유일해야함, 동일한 노드 이름으로 실행하면 이전에 실행되었던 노드가 자동으로 실행 종료
- 실행파일명이 아니라, 노드의 이름이라는 것에 유의!
- talker 노드 이름 기본값은 talker
- 실행 시 노드의 이름을 바꾸려면? → __name 을 사용
$ rosrun roscpp_tutorials talker __name:=another_talker
노드들이 실행되어 있는 상태를 보고 싶을 때, rosnode를 사용했지만, GUI 도구도 존재합니다.
$ rqt_graph
talker 노드를 종료합니다. roscore는 놔두세요~
Understanding ROS Topics
이제 터미널을 두개 실행하고, 각각의 터미널에서 다음과 같이 실행해 줍니다.
$ rosrun roscpp_tutorials talker$ rosrun roscpp_tutorials listener터미널을 하나 더 실행하고, 아까 배웠던 rosnode를 사용해봅시다.
$ rosnode list
/listener
/rosout
/talker두 개의 노드가 실행되고 있습니다. rqt_graph를 실행해 볼까요?
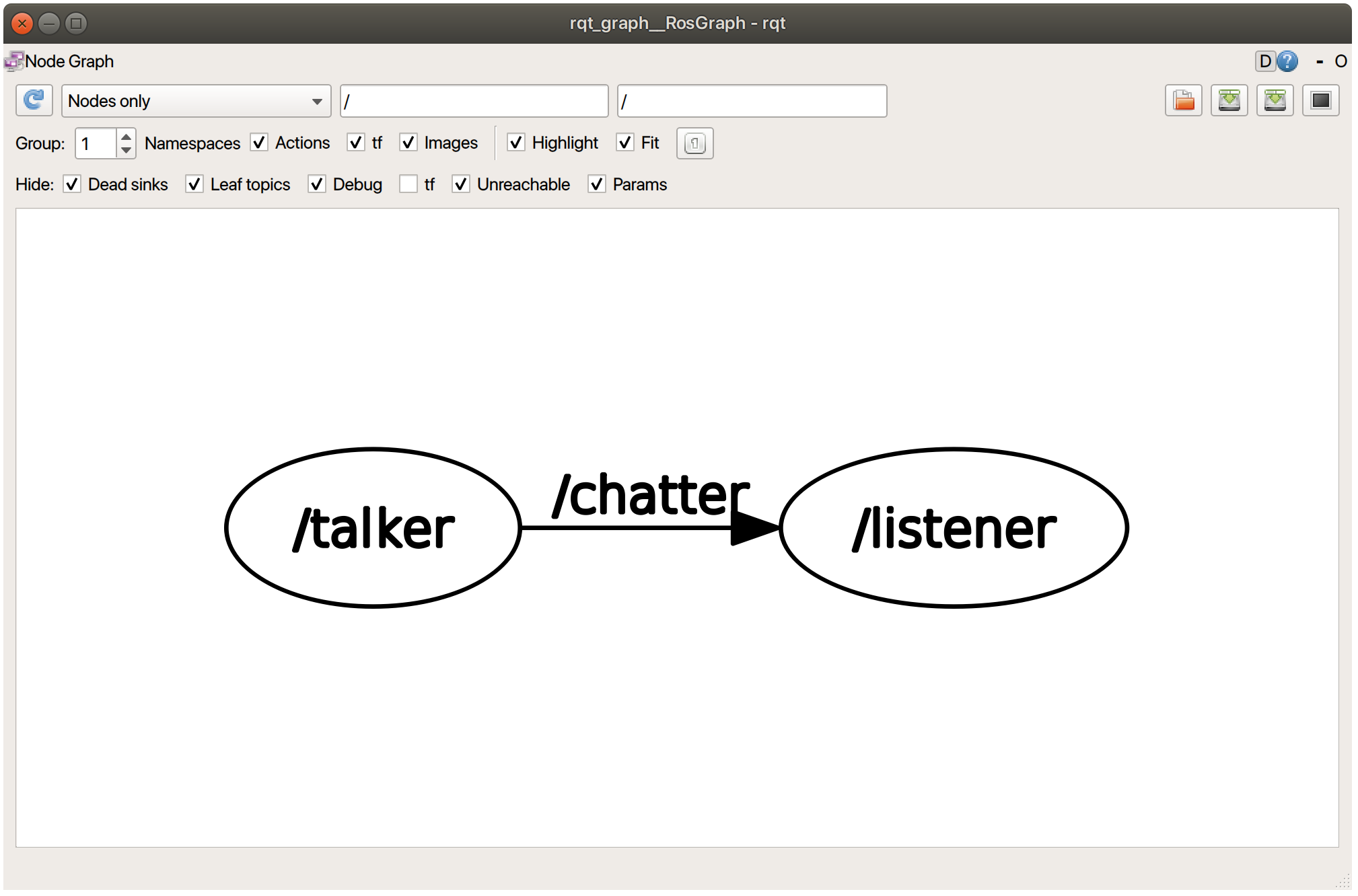
talker, listener 노드가 실행되어 있고, chatter라는 토픽을 이용해 연결이 되어 있습니다. 터미널에서도 볼 수 있다시피, talker 노드가 listener 노드에게 데이터를 전달해 주고 있는 것을 확인할 수 있습니다.
Command tools related with topics
rostopic 도구를 이용해서 토픽에 관련한 다양한 기능을 수행할 수 있습니다. (추후 아주 많이 사용됩니다.)
$ rostopic list
/chatter
/rosout
/rosout_agg$ rostopic -h
rostopic is a command-line tool for printing information about ROS Topics.
Commands:
rostopic bw display bandwidth used by topic
rostopic delay display delay of topic from timestamp in header
rostopic echo print messages to screen
rostopic find find topics by type
rostopic hz display publishing rate of topic
rostopic info print information about active topic
rostopic list list active topics
rostopic pub publish data to topic
rostopic type print topic or field type
Type rostopic <command> -h for more detailed usage, e.g. 'rostopic echo -h'
토픽의 정보 확인
$ rostopic info /chatter
Type: std_msgs/String
Publishers:
* /talker (http://byeongkyu-XPS-15-9570:37369/)
Subscribers:
* /listener (http://byeongkyu-XPS-15-9570:43897/)
토픽의 내용 확인
$ rostopic echo /chatter
data: "hello world 326"
---
data: "hello world 327"
---
data: "hello world 328"
---
data: "hello world 329"
---
data: "hello world 330"
---토픽의 타입 확인
$ rostopic type /chatter
std_msgs/String
토픽이 얼마나 자주 publish되고 있는가?
$ rostopic hz /chatter
subscribed to [/chatter]
average rate: 9.994
min: 0.099s max: 0.101s std dev: 0.00042s window: 9
average rate: 10.000
min: 0.099s max: 0.101s std dev: 0.00047s window: 19물론 GUI 도구도 존재합니다.
$ rosrun rqt_topic rqt_topic
Remapping Topics
- “talker” 노드는 “chatter”란 토픽 이름으로 publish 하고 있고, “listener” 노드는 “chatter”란 토픽 이름을 subscribe 하고 있다.
- 토픽 이름을 바꾸려면?
- 코드를 바꾼다 → 필요할때마다 코드를 바꾸고 빌딩하고... → 번거롭다
- 이럴땐 remapping 기능 사용 :=
$ rosrun roscpp_tutorials talker chatter:=another_chatterrostopic으로 확인해 봅시다.
$ rostopic list
/another_chatter
/rosout
/rosout_agg
roslaunch 활용하기





매번 노드를 실행할 때마다 rosrun을 이용하면 매우 불편합니다. 한꺼번에 실행할 수 있는, 또 remapping이나 노드의 이름을 쉽게 설정할 수 있는 방법이 있어야 하겠죠?
이럴때 roslaunch를 사용합니다.
$ roslaunch -h
Usage: roslaunch [options] [package] <filename> [arg_name:=value...]
roslaunch [options] <filename> [<filename>...] [arg_name:=value...]
If <filename> is a single dash ('-'), launch XML is read from standard input.
roslaunch (http://wiki.ros.org/roslaunch)를 간단하게 소개하면,8
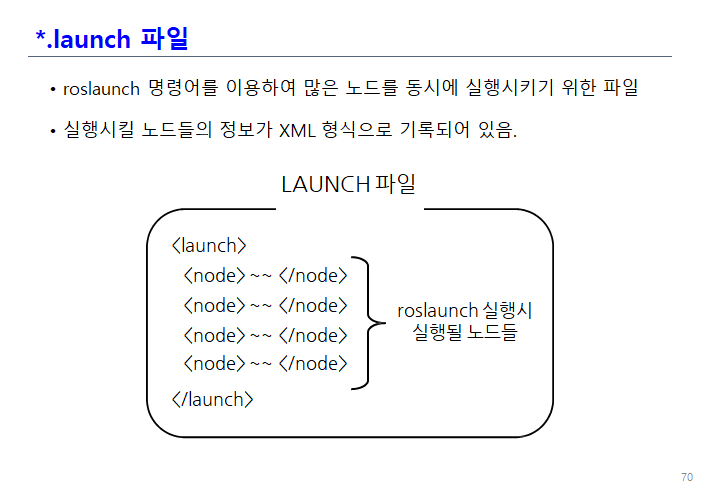
- XML 포멧으로 작성
- 패키지 내의 launch 디렉토리 내에 만드는 것이 통상적임
- 확장자는 .launch
- roslaunch 내에 실행되는 node 들에 대해 실행 우선 순위나, 대기 후 실행 기능은 없음
- roslaunch를 이용하여 실행하는 경우, roscore가 실행되어 있지 않은 경우엔 자동으로 실행
$ roslaunch roscpp_tutorials talker_listener.launch저 파일 내용을 살펴볼까요?
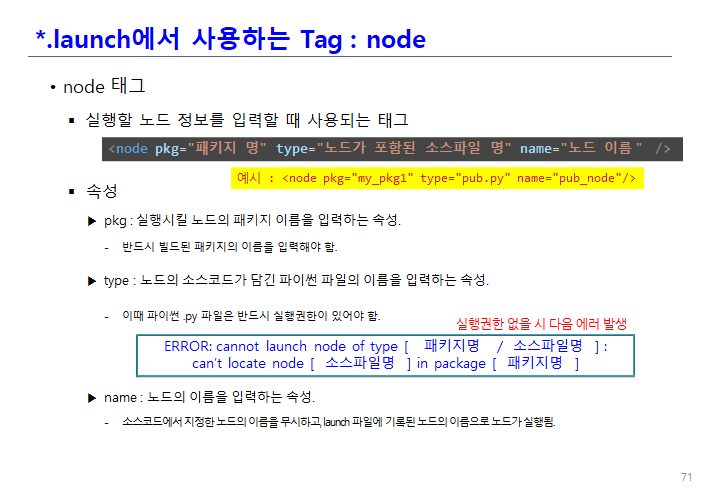
$ rosed roscpp_tutorials talker_listener.launch<launch>
<node name="listener" pkg="roscpp_tutorials" type="listener" output="screen"/>
<node name="talker" pkg="roscpp_tutorials" type="talker" output="screen"/>
</launch>- 노드의 이름, 패키지, 실행화일명을 적어준다
- output은 sysout의 출력 방향. screen은 보고 있는 화면으로, log는 log로...
- roslaunch의 내부 옵션은 이것보다 훨씬 많고 더 복잡함, 차츰 배워내갑시다.
다음 실습을 위해 roscore를 제외한 나머지는 전부 종료합니다.
Understanding ROS Services
터미널을 열고 서비스를 제공하는 노드를 실행해 봅시다.
$ rosrun roscpp_tutorials add_two_ints_serverCommand tools related with service
$ rosservice -h
Commands:
rosservice args print service arguments
rosservice call call the service with the provided args
rosservice find find services by service type
rosservice info print information about service
rosservice list list active services
rosservice type print service type
rosservice uri print service ROSRPC uri
Type rosservice <command> -h for more detailed usage, e.g. 'rosservice call -h'
$ rosservice list
/add_two_ints
/add_two_ints_server/get_loggers
/add_two_ints_server/set_logger_level
/rosout/get_loggers
/rosout/set_logger_level- “add_two_ints_server” 노드는 “/add_two_ints” 서비스를 제공 중
- 어떻게 사용하지?
- 서비스를 호출(call)하기 위한 클라이언트 노드를 만든다
- rosservice를 이용해서 호출
$ rosrun roscpp_tutorials add_two_ints_client 1 2
[ INFO] [1571110622.533042405]: Sum: 3$ rosservice call /add_two_ints "{a: 1, b: 3}"
sum: 4
다음 실습을 위해 roscore를 제외한 나머지에 대해 실행을 종료합니다.
Understanding ROS Parameters
파라미터 서버는 roscore가 실행되면 자동으로 실행됩니다.
- Parameter Server에 데이터를 저장하거나, 불러올 수 도 있음
- Parameter 관련 명령은 rosparam으로...
$ rosparam -h
rosparam is a command-line tool for getting, setting, and deleting parameters from the ROS Parameter Server.
Commands:
rosparam set set parameter
rosparam get get parameter
rosparam load load parameters from file
rosparam dump dump parameters to file
rosparam delete delete parameter
rosparam list list parameter names
$ rosparam get /rosversion
'1.14.5
'
Understanding ROS Actionlib
터미널을 다음의 노드를 실행합니다.
$ rosrun actionlib_tutorials fibonacci_server또 다른 터미널을 열고, action client를 실행해 줍니다.
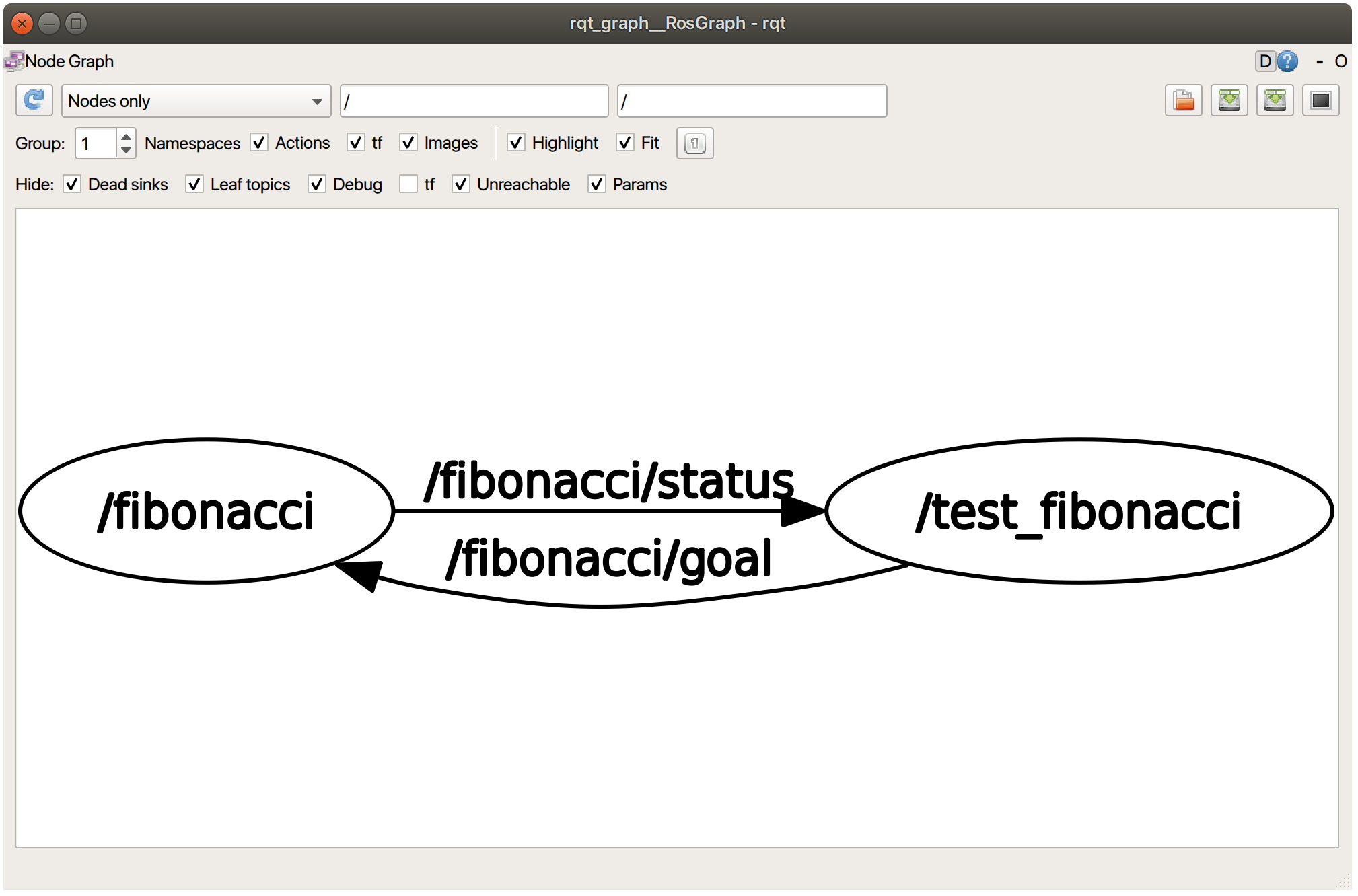
$ rosrun actionlib_tutorials fibonacci_client위 예제는 피보나치 수열을 생성하는 action 서버를 실행하고, action 클라이언트는 원하는 피보나치 수열의 order를 goal로 전달하고 feedback, result를 받습니다.
$ rosrun actionlib_tutorials fibonacci_server
[ INFO] [1591456445.176265355]: fibonacci: Executing, creating fibonacci sequence of order 20 with seeds 0, 1
[ INFO] [1591456465.176437858]: fibonacci: Succeeded$ rosrun actionlib_tutorials fibonacci_client
[ INFO] [1591456560.593028380]: Waiting for action server to start.
[ INFO] [1591456560.820829838]: Action server started, sending goal.
[ INFO] [1591456580.821435336]: Action finished: SUCCEEDEDfibonacci_client가 실행하는 도중, 서버의 feedback 메시지가 어떤 내용을 보내오는지 확인해 봅시다.
$ rostopic echo /fibonacci/feedback
header:
seq: 40
stamp:
secs: 1591456685
nsecs: 263520350
frame_id: ''
status:
goal_id:
stamp:
secs: 1591456685
nsecs: 263147318
id: "/test_fibonacci-1-1591456685.263147318"
status: 1
text: "This goal has been accepted by the simple action server"
feedback:
sequence: [0, 1, 1]
---
다음 진행을 위해 모든 터미널을 종료합니다.
Uploaded by N2T
'python > ROS' 카테고리의 다른 글
| ROS 개요 (0) | 2023.04.06 |
|---|---|
| ROS 기본용어: 그래프 레벨 (0) | 2023.04.06 |
| ROS 기본용어: 파일시스템 레벨 (0) | 2023.04.06 |
| 디스크 공간 확보후 우분투 설치 (0) | 2023.04.04 |
| ROS 기본명령어 (0) | 2023.04.04 |
Contents
소중한 공감 감사합니다